Non ci sono prodotti a carrello.
Controller con retroazione per motore passo-passo





€55,00 IVA inclusa
Controller con retroazione per motore passo-passo in grado di verificare dinamicamente il posizionamento dell’albero e prevenire eventuali perdite di passo nella stampa 3D, nelle CNC, ecc
oppure
Puoi anche pagare in 3 rate senza interessi da €18,33 scegliendo ![]() come pagamento. Scopri di più
come pagamento. Scopri di più
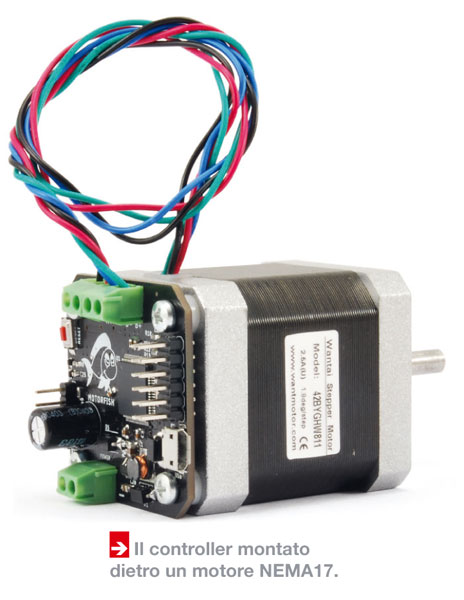
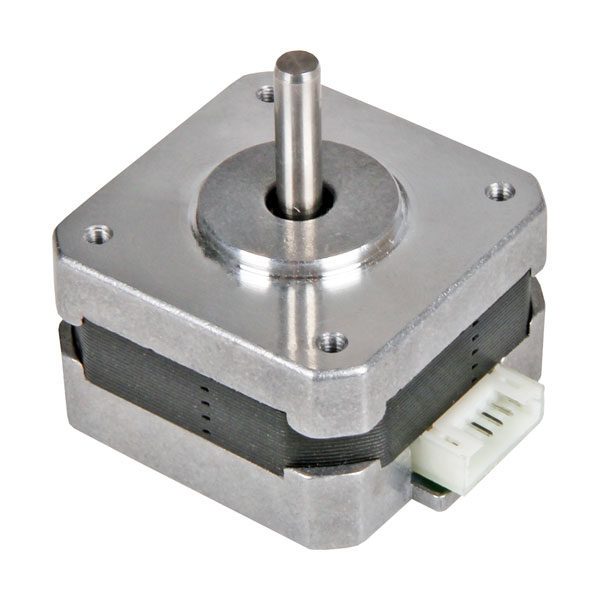
| Controller con retroazione per motore passo-passo in grado di verificare dinamicamente il posizionamento dell’albero e prevenire eventuali perdite di passo nella stampa 3D, nelle CNC, ecc. Si monta direttamente su motori NEMA17.
Tutta la gestione del controller è affidata al microcontrollore programmato PIC32MX250F256HI/PT della Microchip; mentre il driver DRV8843 della Texas Instrument, pilotato direttamente da impulsi PWM, permette il controllo del motore passo-passo anche con microstepping molto fitti. L’encoder magnetico AM4096, dotato di una risoluzione pari a 12 bit (4096 passi / giro), è in grado di rilevare la posizione dell’alberino del motore e trasmetterla al controller. È possibile controllarlo attraverso interfaccia USB, porta I2C o porta SPI. Disponendo inoltre dei classici input di EN/DIR/STEP tipici dei controller tradizionali, è possibile sostituire il proprio driver con MotorFish. È inoltre presente un pulsante di reset, LED di stato, morsettiera a 4 poli per i due avvolgimenti del motore e una morsettiera per l’alimentazione (da 8,5 e 45 VDC). Dimensioni (mm): 42,2×42,2×12, peso: 12,5 grammi. |
|
 |
|
| Alcuni esempi di utilizzo | |
| A chi non è mai capitato di lanciare una stampa 3D complessa e lunga, magari un lavoro di ore o decine di ore, assentarsi e scoprire che, a lavoro quasi terminato, i motori della stampante hanno perso qualche passo col risultato di avere l’oggetto rovinato, stampato male con degli strati non allineati tra loro? Purtroppo è frequente e la cosa sorprendente (o irritante…) è che succede quasi sempre verso la fine della stampa, causando notevole spreco di materiale e di tempo. Siccome la stragrande maggioranza delle stampanti 3D in commercio utilizza dei motori passo-passo controllati ad anello aperto, la cosa è inevitabile perché il controller non ha modo di accertare se l’ordine impartito viene correttamente eseguito dal motore, ovvero se ad ogni impulso inviato il rotore avanza effettivamente di un passo. Con questo controller si potrà invece utilizzare il motore in modalità anello chiuso. |
|
 |
|
|
Controllo ad anello aperto (open loop): Controllo ad anello chiuso (closed loop): |
|
|
Caratteristiche tecniche
|
|
|
|
|
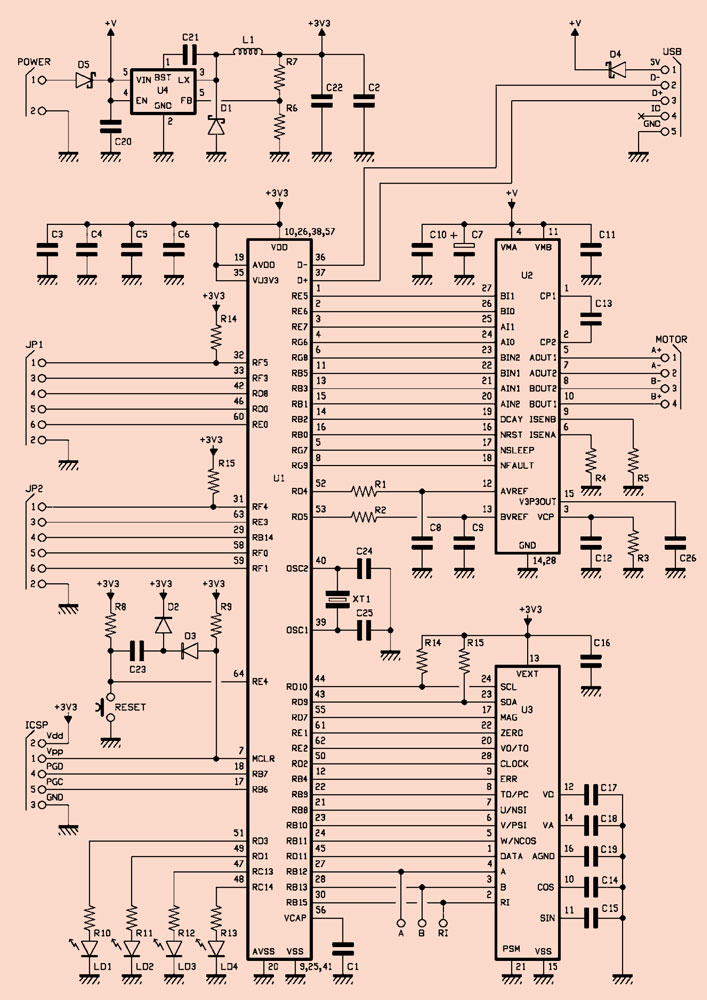
Schema elettrico
|
|
 |
|
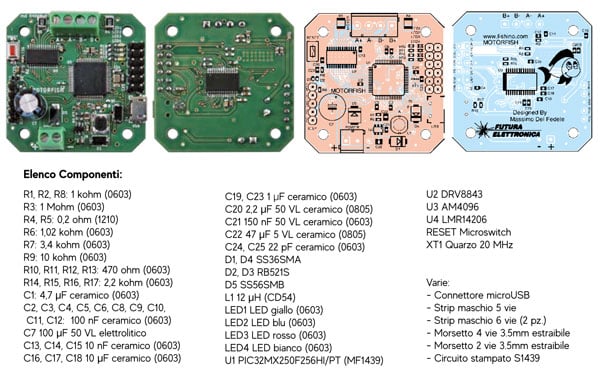
| Piano di montaggio ed elenco componenti | |
 |
|
|
Documentazione e link utili
|
|
-
 €18,00 IVA inclusa
€18,00 IVA inclusaDisponibilità immediata.
-
 €17,50 IVA inclusa
€17,50 IVA inclusaDisponibilità immediata.
-
 €24,00 IVA inclusa
€24,00 IVA inclusaDisponibilità immediata.
-
