Non ci sono prodotti a carrello.
Arduino Tinkerkit Braccio Robotico





€319,00 IVA inclusa
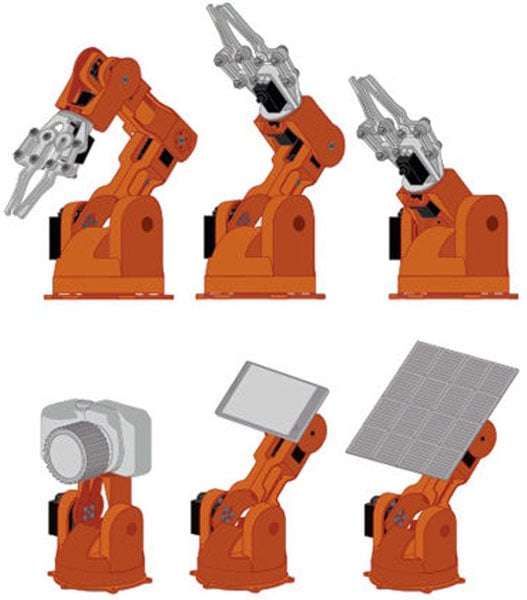
Questo set contiene tutto il necessario per realizzare un braccio robotico controllabile tramite Arduino, completo di pinza per afferrare gli oggetti e con la possibilità di montare fotocamere, piccoli pannelli solari, smartphone, ecc
oppure
Puoi anche pagare in 3 rate senza interessi da €106,33 scegliendo ![]() come pagamento. Scopri di più
come pagamento. Scopri di più
| Questo set contiene tutto il necessario per realizzare un braccio robotico controllabile tramite Arduino, completo di pinza per afferrare gli oggetti e con la possibilità di montare fotocamere, piccoli pannelli solari, smartphone, ecc.
La confezione comprende: 6 Servi RC analogici con ingranaggi in metallo (2 tipo SR 311, 4 tipo SR 431), 1 shield per servo RC, 1 pinza robotica, le parti meccaniche e plastiche per realizzare la struttura del braccio, una base in legno con inciso l’angolo di rotazione, alimentatore 5 volt 5 A, cavi di collegamento, attrezzi per il montaggio e manuale illustrato. N.B. lo shield è compatibile con i seguenti modelli di Arduino: Uno, Uno SMD, Uno WiFi, Due, Mega 2560, Ethernet, Leonardo, Leonardo ETH, M0, M0 Pro. Attenzione! Arduino non è compreso, vedere prodotti correlati. Per un corretto utilizzo dello shield del è necessario utilizzare la versione IDE 1.7.11 o superiore. |
 |
| Caratteristiche tecniche |
|
| Documentazione e link utili |
-
-
€59,00 IVA inclusa
Momentaneamente esaurito, data di arrivo da confermare.
-
-
€49,00 IVA inclusa
Momentaneamente esaurito, data di arrivo da confermare.